Haowen Shi
Computer engineering and robotics enthusiast.
Project Gallery
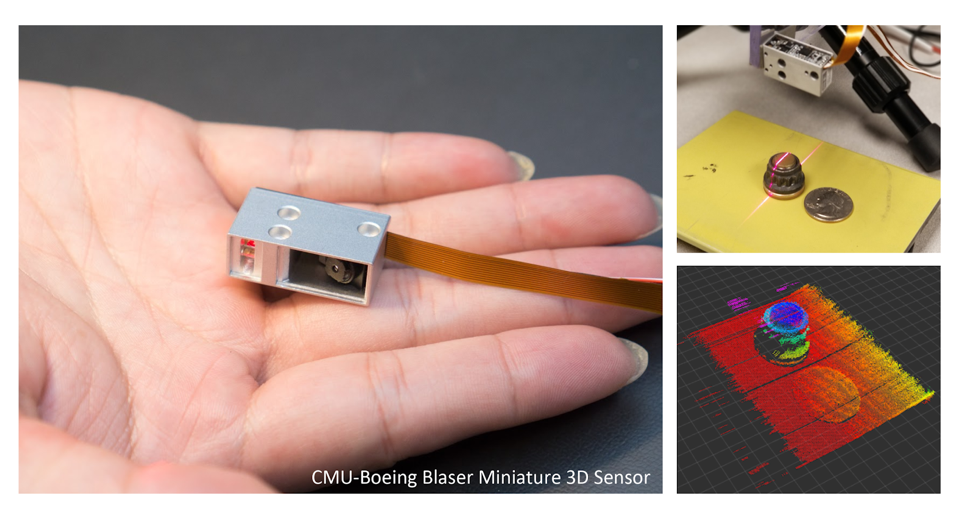
Blaser Line Scanner
A high performance confined space 3D scanner
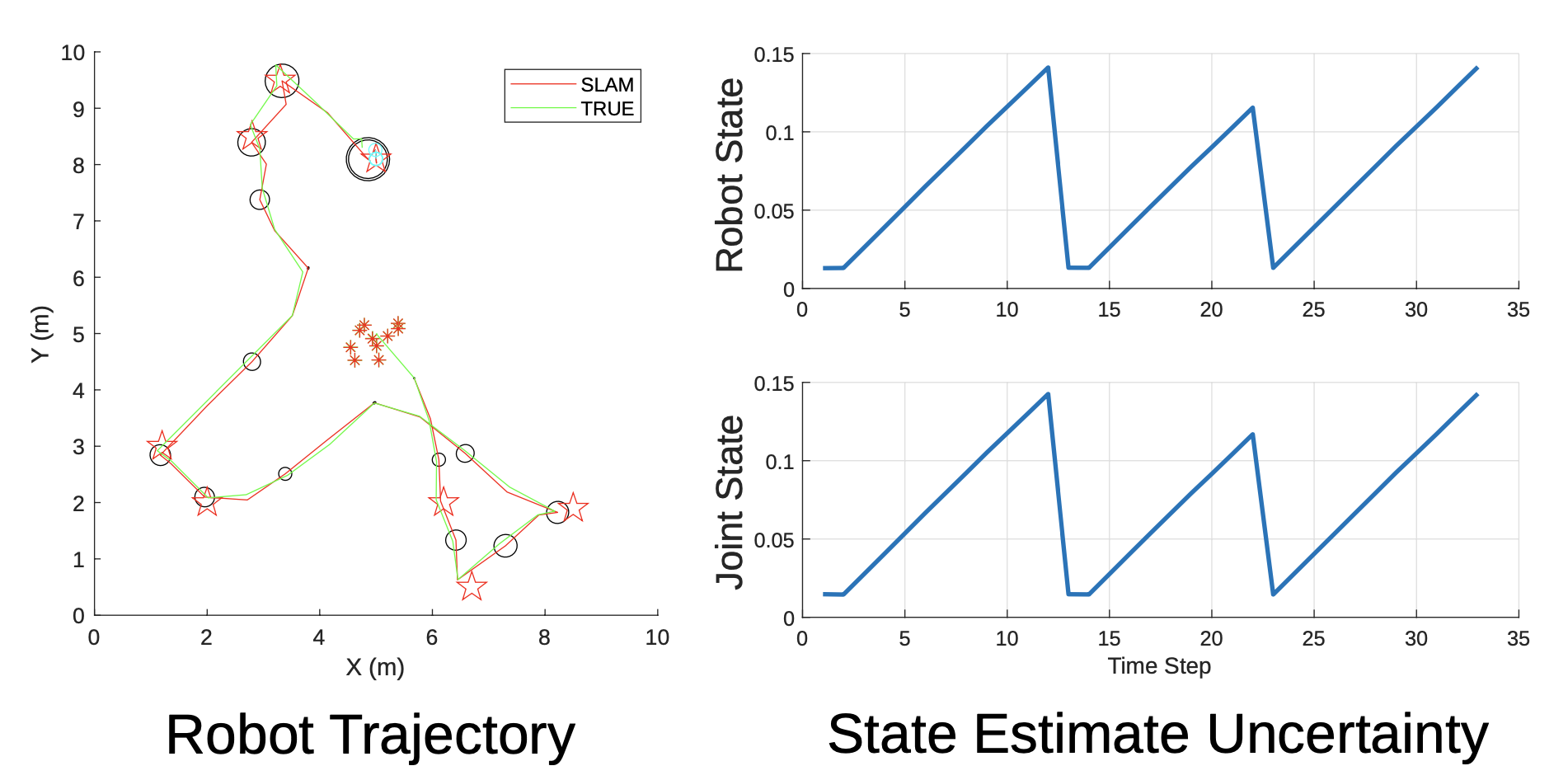
Implementation for Planning in Generalized Belief Space (GBS)
Matlab implementation of an active-perception planner that plans uncertainty-reducing behaviors.
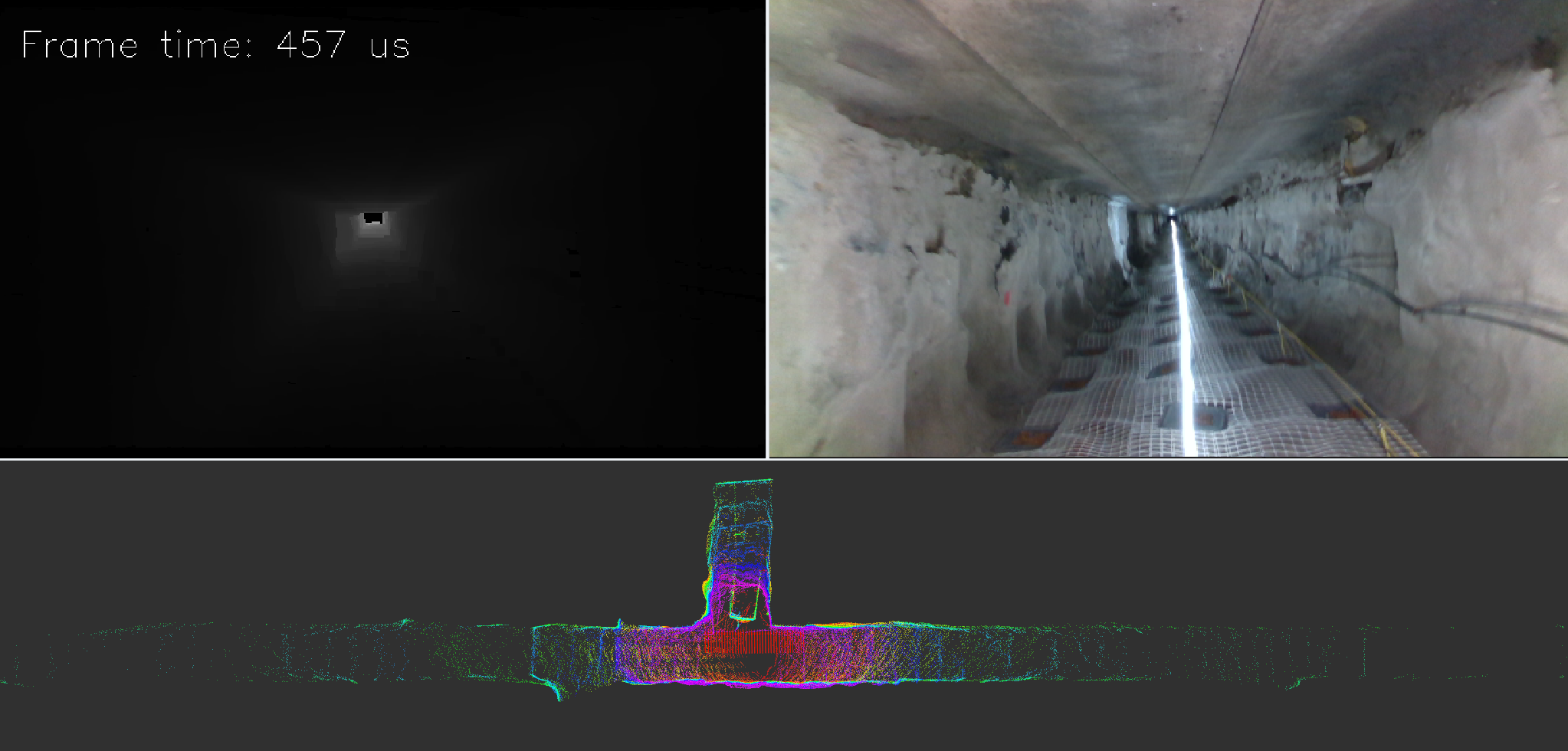
Parallel LiDAR Depth Image Renderer
Parallel implementation of a renderer projecting 3D LiDAR points to 2D image.
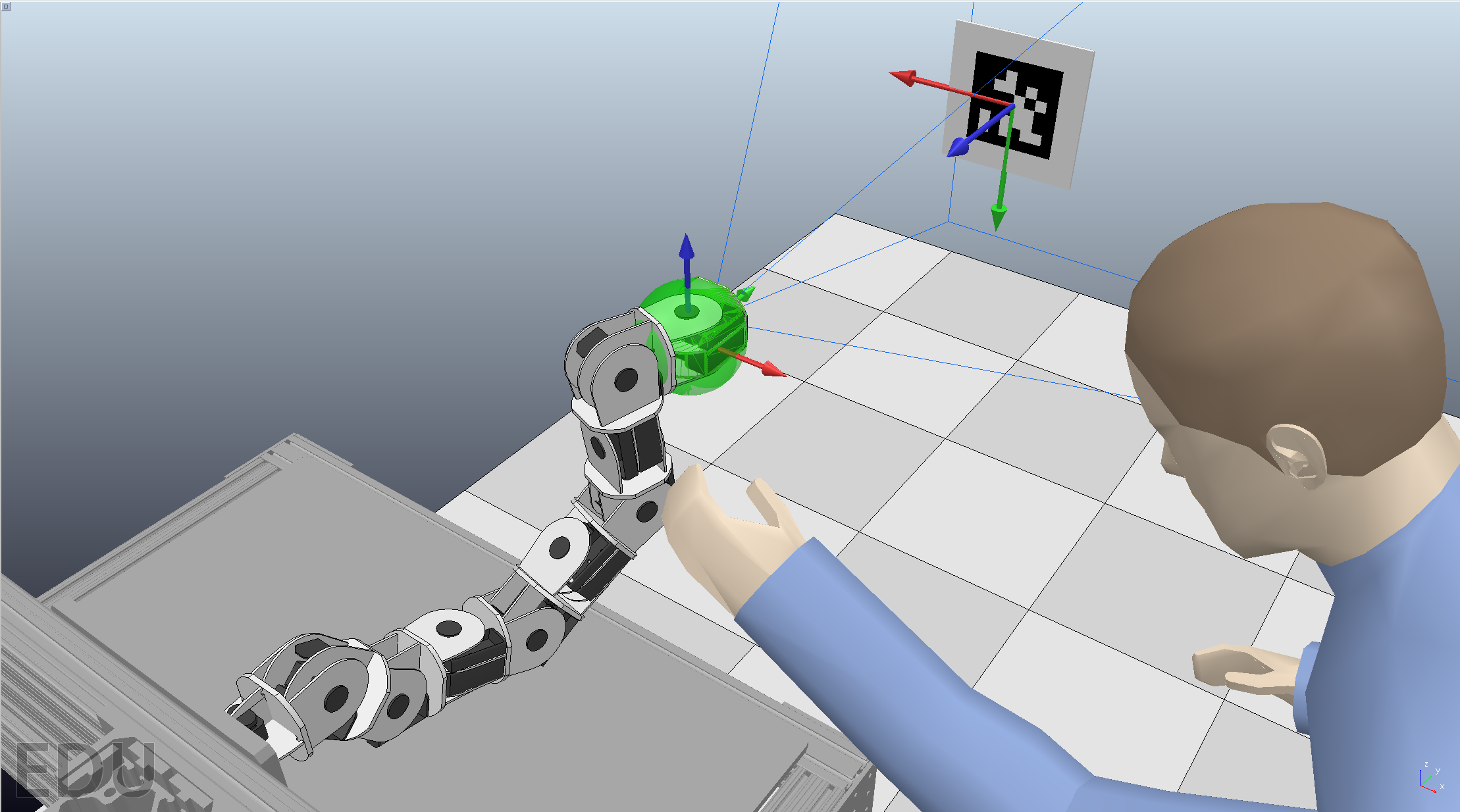
Visual Servoing for Flexible Robot Manipulators
A method to solve the inverse kinematics problem for robot manipulators with flexible links
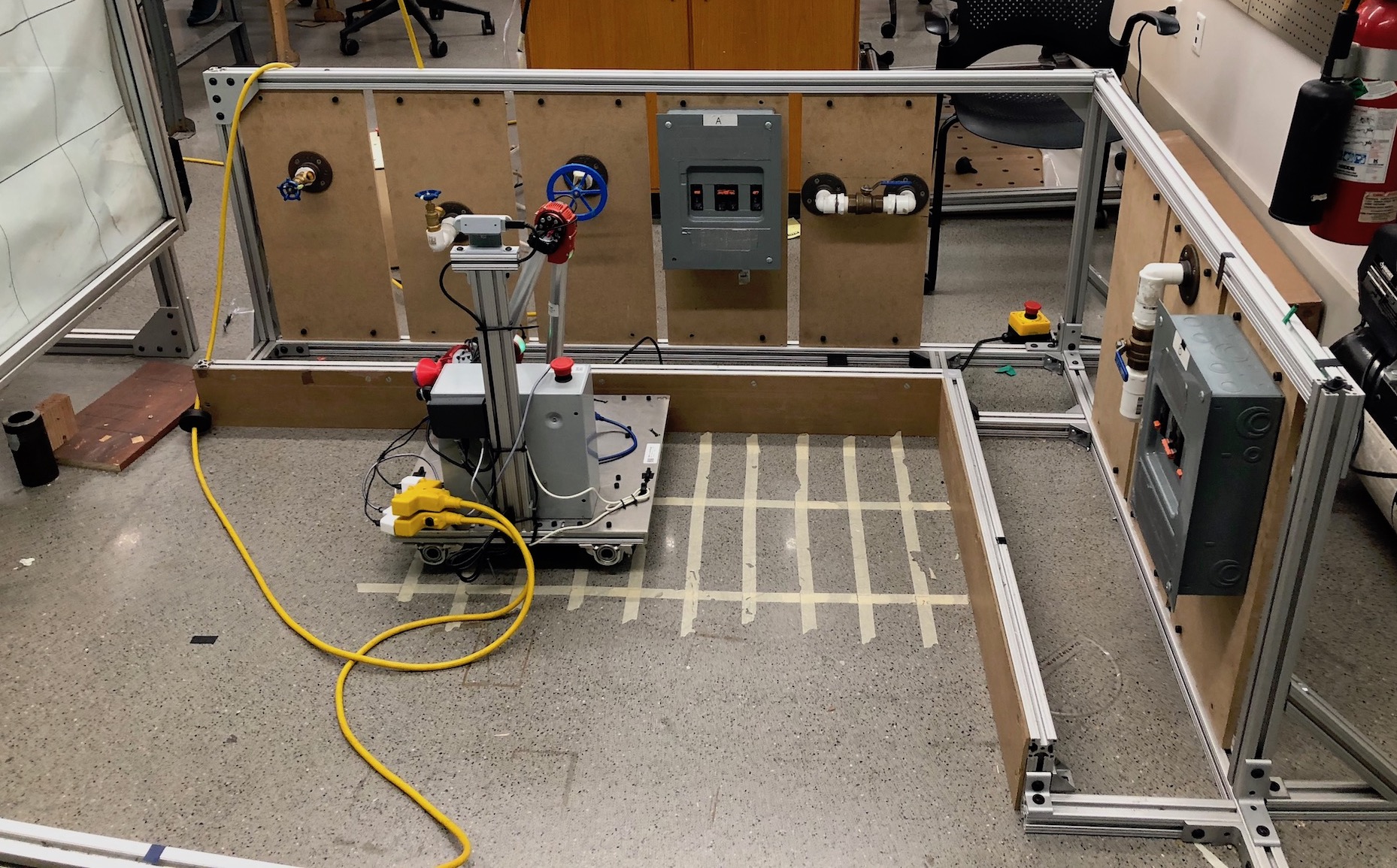
JollyRoger ShipBot
CMU Mechatronic Design 2019 ShipBot Challenge
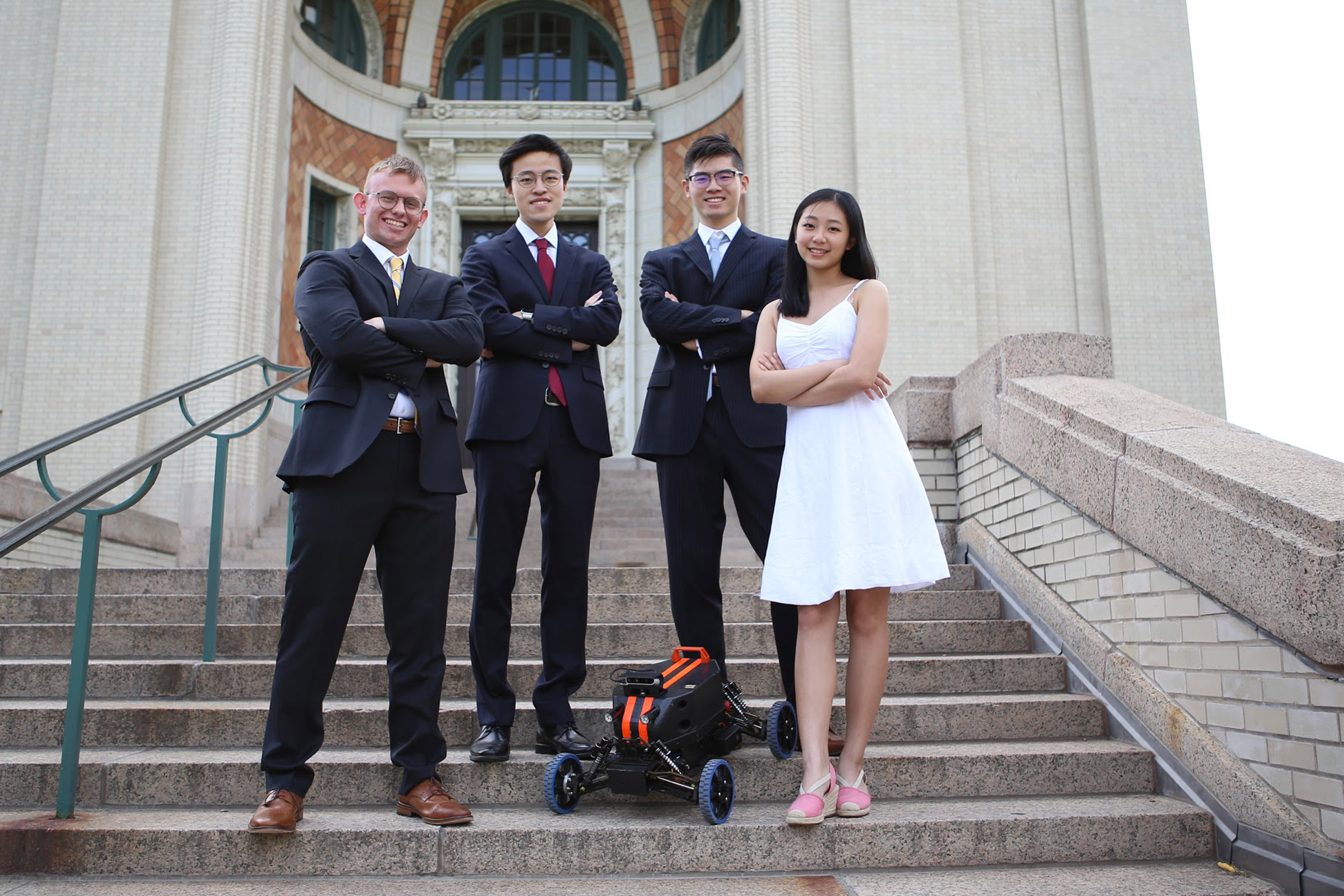
Robomonkey Jogging Companion
CMU Robotics System Engineering + Robotics Capstone Project
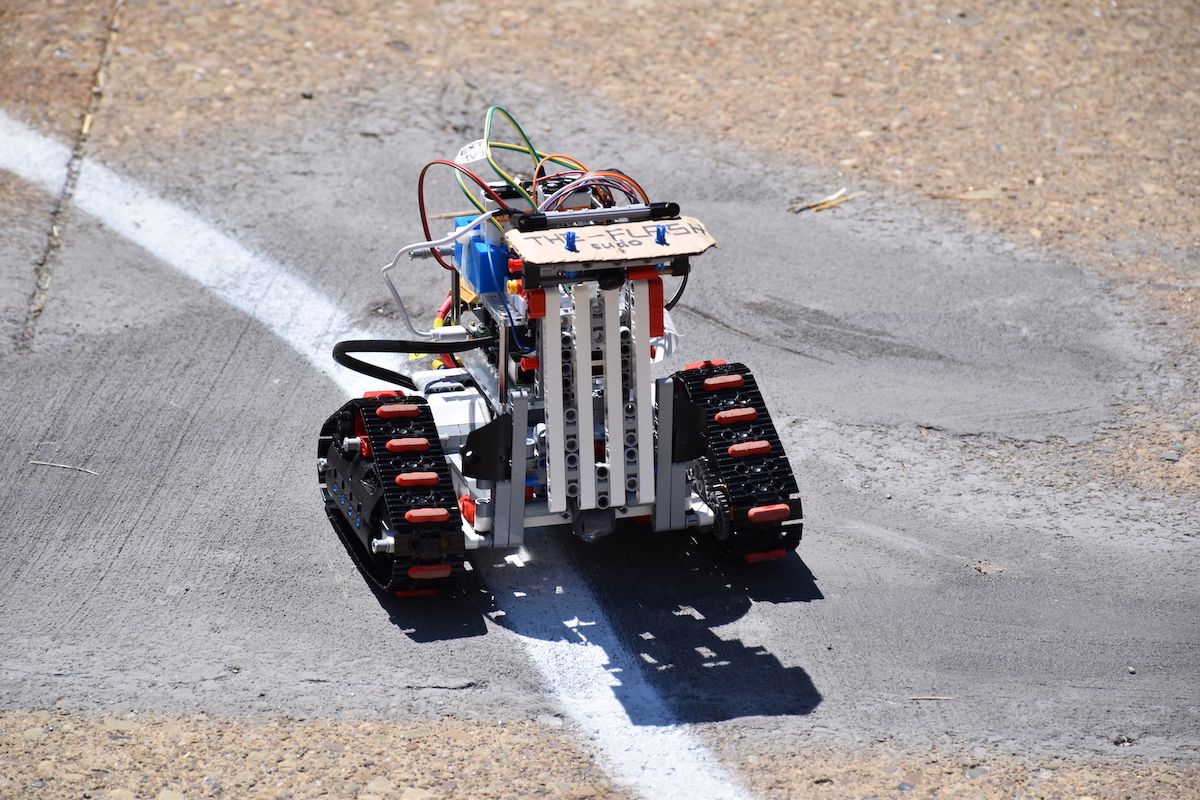
Mobot "the-flash-sudo"
CMU Annual Mobot Challenge